


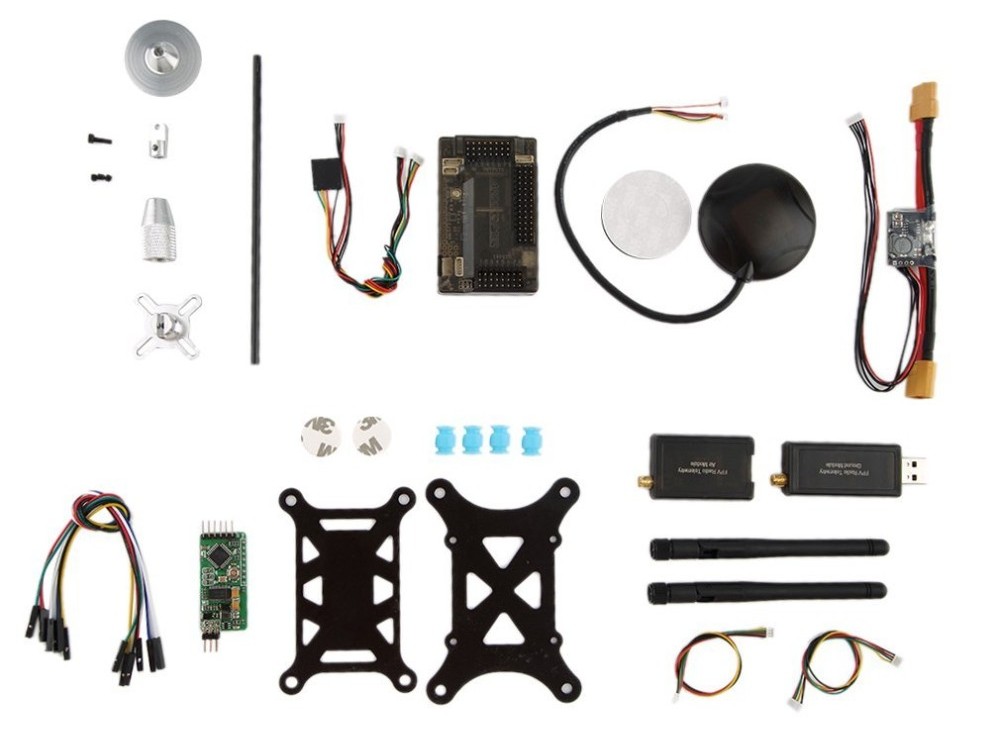
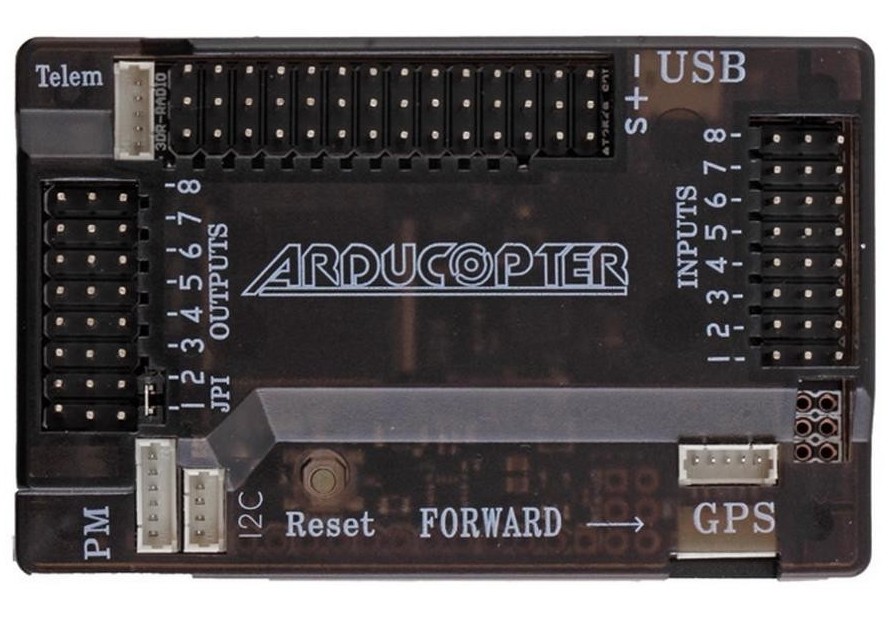












El ArduPilot es un controlador de vuelo para UAV (Vehículo Aéreo no Tripulado) quadcopter, compatible con Arduino. Esta tarjeta se puede utilizar para CRIUS AIOP y Arduflyer/Ardupilot-mega.
Características:
- Microcontrolador: ATMEGA328P
- MAX7456-EUI monocromo de visualización en pantalla
- 5 V/500mA DC/DC regulador para EL MAX7456-EUI
- Voltaje de funcionamiento: 5 V (conector FTDI) y 12 V (conector Video I/O)
- Compatible con NTSC y PAL
- Conector FTDI
- Giroscopio, Acelerómetro, Magnetómetro, Barómetro, GPS
- 3DR Radio Telemetría Kit 915 Mhz
- Sensibilidad del receptor: -121dBm
- Potencia de transmisión de hasta 20dBm (100 mW)
- Enlace serie transparente
- Velocidades de datos en el aire hasta de 250 kbps
- Distancia: aproximadamente 1 milla (1609m)
- Salto de frecuencia de espectro ensanchado (FHSS)
- Multiplexación por división de tiempo adaptativo (TDM)
- Soporte para LBT y AFA
- Ciclo de trabajo Configurable
- Construido con el código de corrección de error (se puede corregir hasta un 25% de errores de bits de datos)
- Rango de varios kilómetros con una pequeña antena omnidireccional
- Se puede utilizar con un amplificador bidireccional
- Firmware de código abierto
- Comandos AT para la configuración de radio
- Cpmandos RT para la configuración remota de radio
- Control de flujo adaptativo cuando se utiliza con APM
- Basado en el modelo de radio HopeRF HM-TRP, con un SiLabs Si1000 RF microcontro
- Mavlink-osd V2.0
Palabras claves:ardupilot, controlador vuelo, uav, dron, quadcopter, telemetria